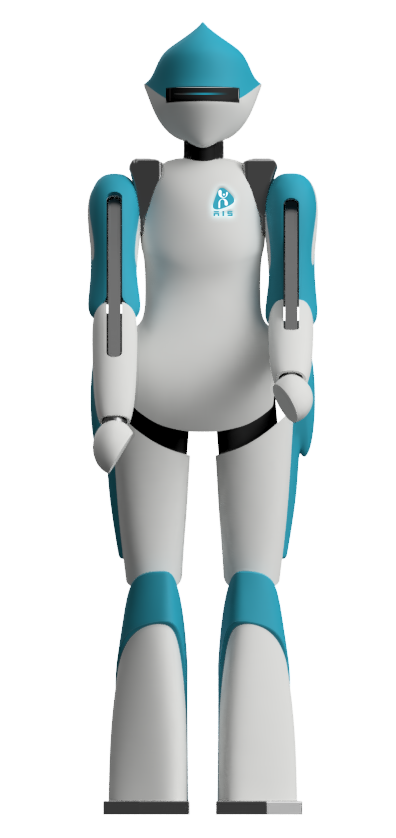
大双足仿生机器人
---系统采用经典Linux 操作系统, 方便开发和学习.
---采用新一代机器人结构和驱动技术Bio-design@ , 紧紧把握机器人未来发展潮流和方向
---采用超低功耗和高能效方案,并行处理驱动器架构.
---采用太阳能永续电池方案, 保证机器人的动力.
---采用陀螺仪和压力传感等模组, 适合各种算法开发
--双足运动速度实验可达到0.4m/s
---集合了图像识别、人脸识别模块
科研 实验平台
适用于大公司研发部门、机器人实验室、机器人技术相关研究机构